步进电动机通过其内部的转子和定子上的小齿进行定位。
伺服电动机则使用连接到其内部转子的编码器进行定位。
此外,基于步进电动机结合开环控制和闭环控制执行混合切换控制。
接下来将介绍以上三种电动机的构造和驱动原理。

步进电动机的构造
步进电动机的断面图如下图所示。
步进电动机构造上大致分为定子与转子两部分。转子由转子1、转子2、永磁磁钢3部分构成。
此外,转子已被轴向磁化,转子1为N极时,转子2则为S极。
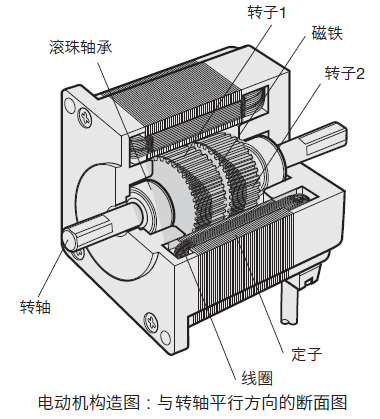
定子拥有小齿状的磁极,皆绕有线圈。其线圈的对角位置的磁极相互连接着,通电时,线圈即会被磁化成同一极性。(例如对某一线圈进行通电后,对角线的磁极将磁化成S极或N极。)
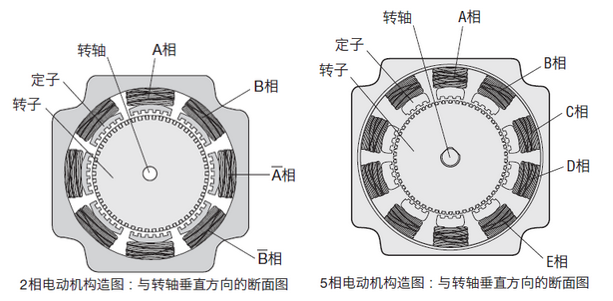
对角线的2个磁极形成1个相。
有A相至E相等5个相位的机型称为5相步进电动机、有A相和B相2个相位的机型称为2相步进电动机。
转子的外圈由50个小齿构成,转子1和转子2的小齿于构造上互相错开1/2螺距。
励磁:是指电动机线圈通电时的状态
磁极:是指励磁后变成电磁铁的定子突出部分
小齿:是指转子和定子的小齿
步进电动机的动作原理
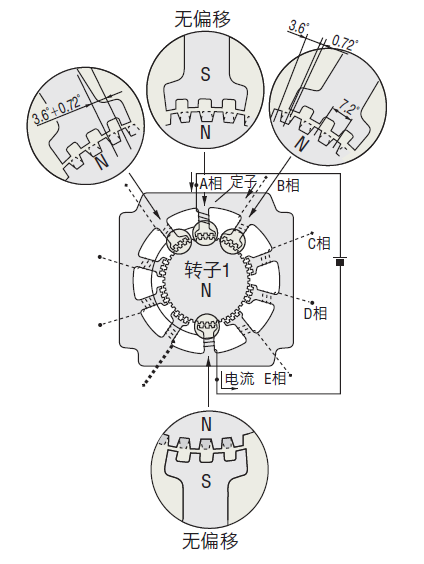
下面以5相步进电动机为实例,针对实际上经过磁化后的转子及定子的小齿的位置关系进行说明。
将A相励磁时
将A相励磁,会使得磁极磁化成S极,而其将与带有N极极性的转子1的小齿互相吸引,并与带有S极极性的转子2的小齿相斥,于平衡后停止。此时,没有励磁的B相磁极的小齿和带有S极极性的转子2的小齿互相偏离0.72°。以上是A相励磁时的定子和转子小齿的位置关系。
将B相励磁时
其次由A相励磁转为B相励磁时,B相磁极磁化成N极,与拥有S极极性的转子2互相吸引,而与拥有N极极性的转子1相斥。
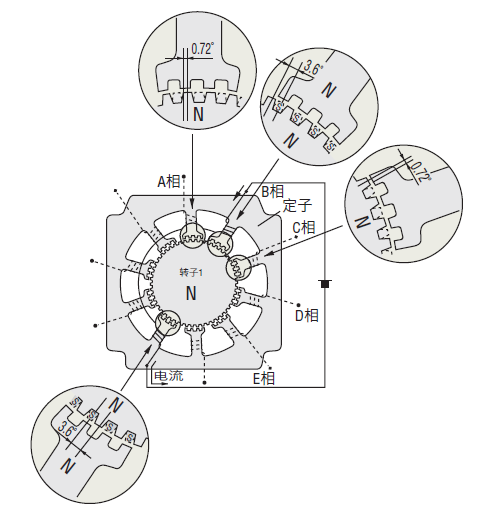
也就是说,将励磁相从A相励磁转换至B相励磁时,转子旋转0.72°。
由此可知,励磁相位随A相→B相→C相→D相→E相→A相依次转换,则步进电动机以每次0.72°做正确的旋转。
此外,希望作反方向旋转时,只需将励磁顺序倒转,依照A相→E相→D相→C相→B相→A相励磁即可。
0.72°的高分辨率取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确定位。
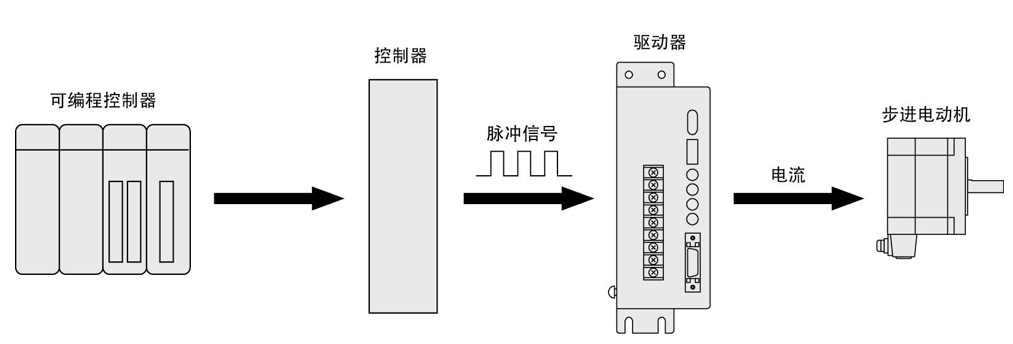
开环控制与系统构成示例
下图为脉冲型驱动器驱动步进电动机时的系统构成示例。
步进电动机进行开环动作,驱动器根据从控制器所输出的脉冲信号控制步进电动机同步,以设计的步距角(分辨率)进行运转。此类开环控制的步进电动机相对于转矩波动的波动范围很小,同步性较高,可以在没有转子位置检测的情况下运行。

伺服电动机的构造
AC伺服电动机在电动机的反输出轴侧搭载有转速探测器(编码器),通过检测转子的位置和速度,可执行高分辨率、高响应定位运行。
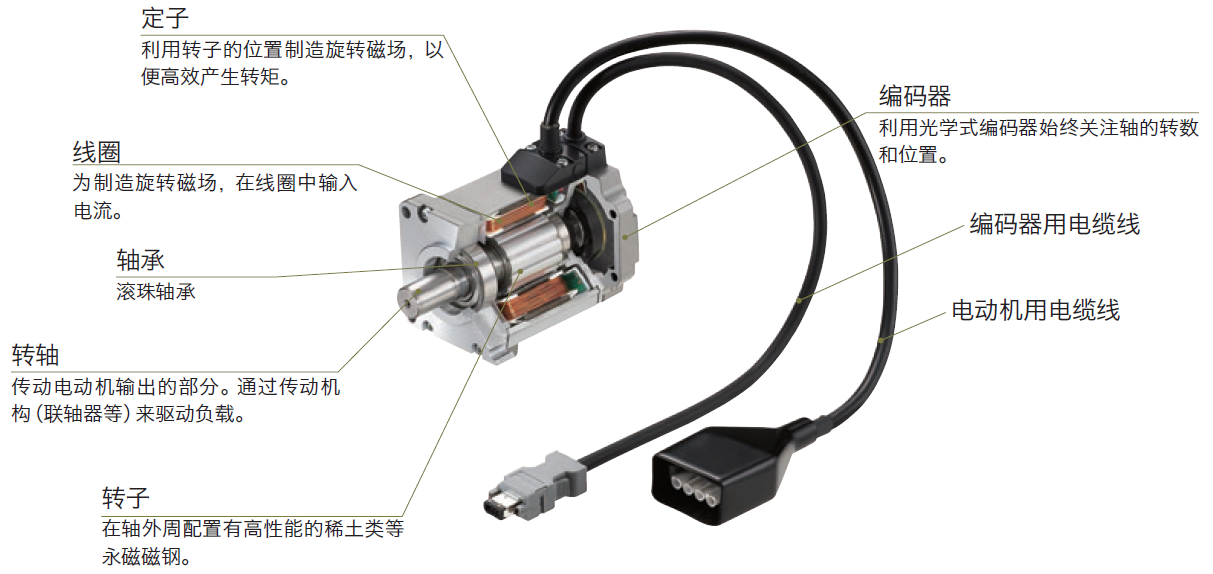 编码器是检测电动机转速和位置的传感器。
编码器是检测电动机转速和位置的传感器。
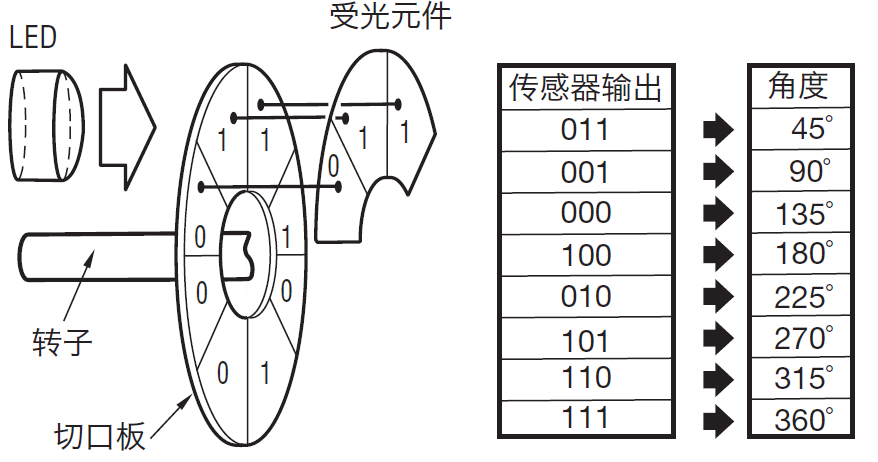
发光二极管(LED)发出的光线穿过切口圆盘上的位置检测模式,由受光元件读取。受光元件上集成有数十个光电晶体管。绝对位置检测用模式因编码器的旋转角度不同而全部不同。
编码器搭载CPU,对绝对位置检测用模式进行分析。通过串行通信将该当前位置数据传送到伺服驱动器。
编码器的种类
绝对式编码器
电动机搭载编码器,用于向驱动器反馈电动机轴的旋转位置及转速。
根据构造的不同,可以分为绝对式编码器与增量式编码器两类。
本公司的AC伺服电动机NX系列使用了20bit的绝对式编码器,实现了在低速领域的低振动。
 绝对式编码器可检测电动机旋转一圈内的绝对位置,并输出旋转角度的绝对位置。
绝对式编码器可检测电动机旋转一圈内的绝对位置,并输出旋转角度的绝对位置。
通常,通电后先发送旋转圈速信息至驱动器,再输出当前位置信号。
增量式编码器
用于检测电动机的旋转量、转速、旋转方向的编码器。
对应角度的变化,输出相应的脉冲信号。通常,直接发送检测出的波形,因此停电时当前位置无法保存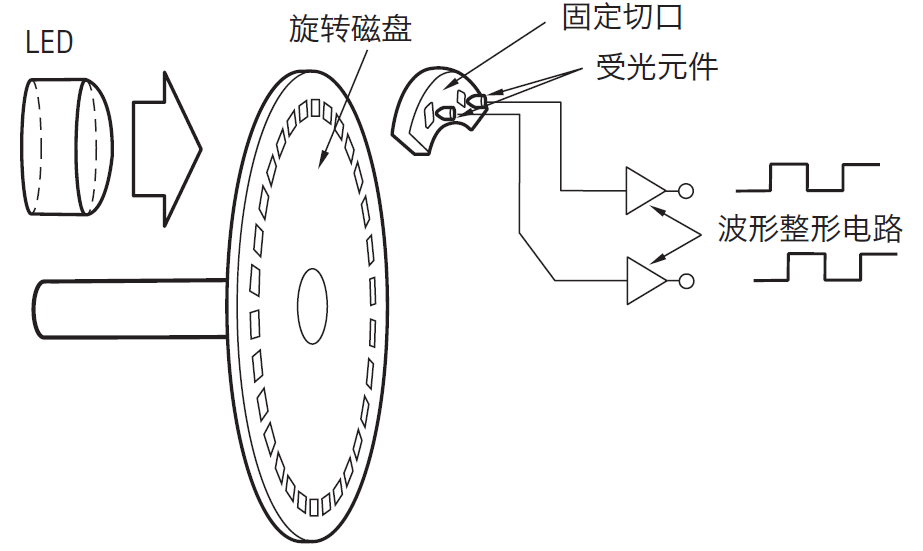
AC伺服电动机的控制配置图
对来自外部的脉冲信号(脉冲序列输入型时)和伺服电动机的编码器检测到的运转量进行计数,将其差分(偏差)输出到速度控制部。这个计数器被称为偏差计数器。
电动机旋转过程中,偏差计数器出现积存脉冲(=位置偏差),将该积存脉冲控制为0。
通过定位环(偏差计数器)实现了保持当前位置的(伺服锁定)功能。

AC伺服电动机由电动机和编码器、以及驱动器3个要素构成,驱动器的作用是对位置指令和编码器的位置、速度信息进行比较,控制驱动电流。 AC伺服电动机时常会通过编码器的位置、速度信息检测电动机的状态,因此,万一电动机停止运行,也能够向控制器侧输出警报信号,检测出异常状态。 AC伺服电动机必须根据机构的刚性及负载条件来调整控制系统的参数,但近年来采用了实时自动增益调整,这种调整变得非常简单。
闭环控制与系统构成示例
下图为脉冲型驱动器驱动伺服电动机时的系统构成示例。 电动机搭载旋转检测器(编码器),向驱动器反馈电动机轴的旋转位置/转速。驱动器通过演算从控制器发出的脉冲信号(位置指令/速度指令)与反馈信号(当前位置/速度)的误差,将此误差控制为0,进行电动机旋转的控制。是通过使用电动机、驱动器、编码器构成闭环控制,可以进行高精度定位运行的电动机。

αSTEP AZ系列的构造与ABZO编码器
电动机部分的构造与步进电动机相同。作为最大的特征,在电动机的反输出轴侧安装了新开发的ABZO编码器,无需电池构筑了机械式绝对系统。

对于ABZO编码器,将以模拟时钟作为举例说明。
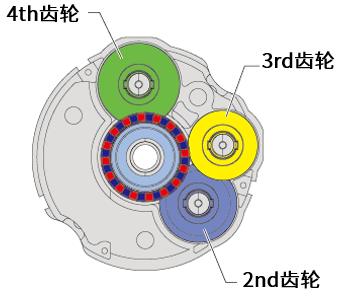
模拟时钟根据秒针、分针、时针的位置测定当前时间。ABZO编码器相当于搭载了4个相当于时钟时针的齿轮,通过识别这4个齿轮的角度来检测位置信息。
可根据作为基准的原点,利用电动机轴检测±900 转(1800次旋转)✽ 的绝对位置。
✽安装尺寸20mm、28mm为±450转(900次旋转)。

ABZO编码器的位置检测原理和构造的介绍。
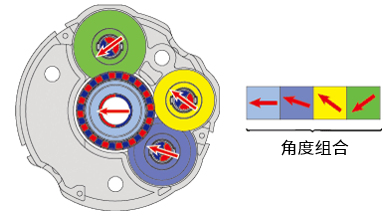
ABZO编码器是通过在电动机轴上设置的磁石,并在其周围设置带有磁石的齿轮,依靠读取磁场方向来检测坐标。
下图是在电动机轴上设置的磁石。磁石中心为2极磁石,外圈为多极。
读取中心2极磁石的磁场可检测出大致的朝向。同时读取外圈多极磁场的相位组合,可精确算出位置坐标。
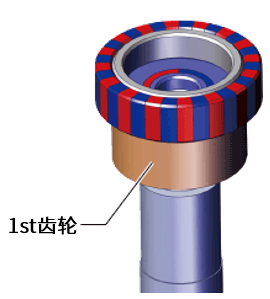
中心的电动机轴上设有1个齿轮(1st齿轮),与该齿轮相连的有2列齿轮。 第1列齿轮由二级齿轮构成(1st/2nd 齿轮、2nd/3rd齿轮),第2列齿轮由一级齿轮构成(1st/4th齿轮)。
以下是从初始状态任意旋转后计算坐标的原理。
初始状态时,全部箭头指向左边。
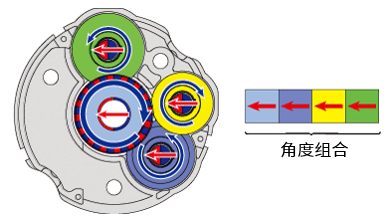
任意旋转后可见箭头指向不同的方向。
因为相对的齿轮之间有齿数差,所以电动机轴每旋转一周相连的齿轮会发生相位变化。
利用齿数比产生的相位差,以齿为单位检测出齿轮相位,并根据相位的组合可算出多次旋转后的坐标。
按照设计所有齿轮的相位在旋转1800圈后回到初始相位。
因此,ABZO编码器可检测范围是1800圈。
αSTEP AZ系列的驱动原理
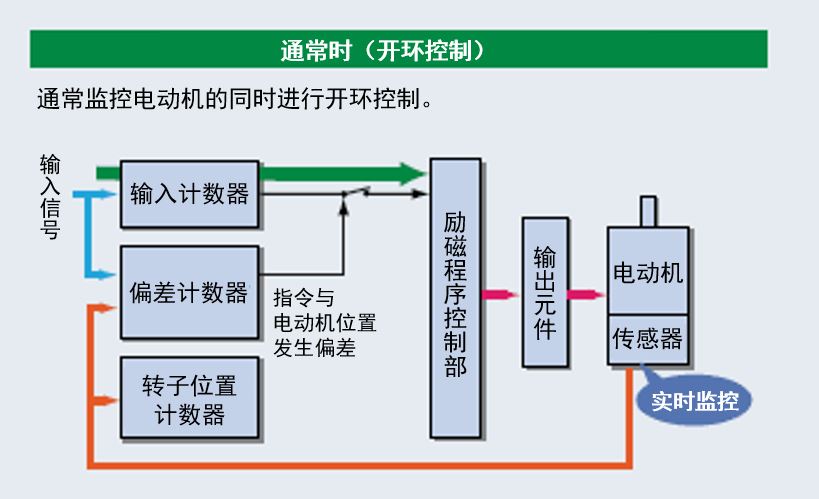
下图将对αSTEP的控制方式进行介绍,是一种将开环控制和闭环控制混合而成的控制方式。
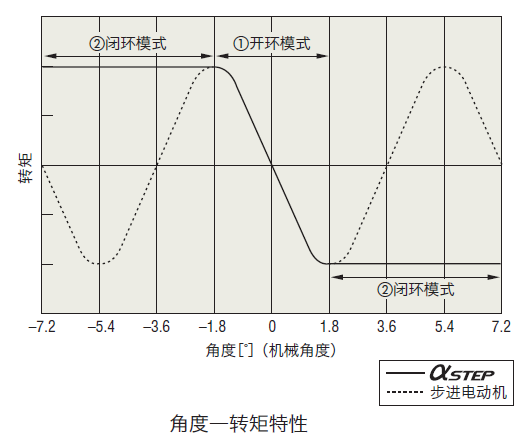
通过偏差计数器的计算可得知脉冲序列信号的指令位置与实际的转子旋转位置的偏差量(延迟/过转)。通过偏差计数器的计算结果判断是否进入“过载领域”,以转换开环模式/闭环模式来运行。通常情况下,以开环模式运行。过载时,以闭环模式运行。
●过载时切换为闭环控制
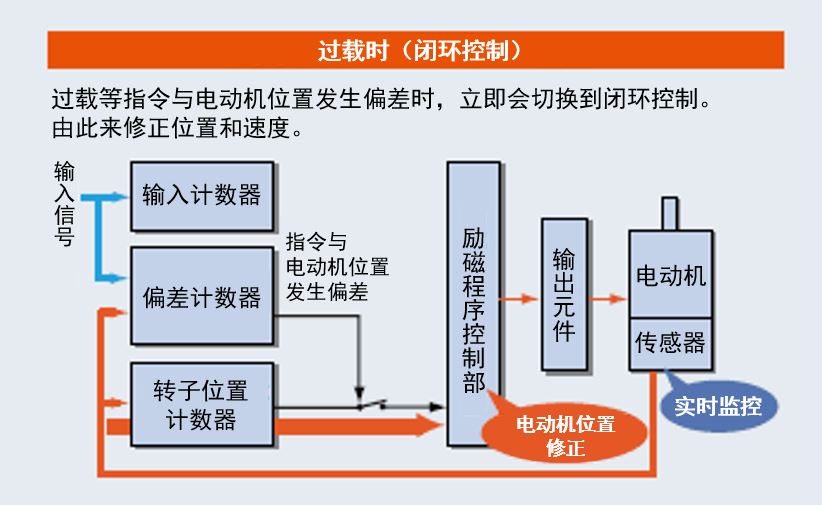 编码器会持续监控位置并在位置偏差超过±1.8°时切换到闭环模式。
编码器会持续监控位置并在位置偏差超过±1.8°时切换到闭环模式。
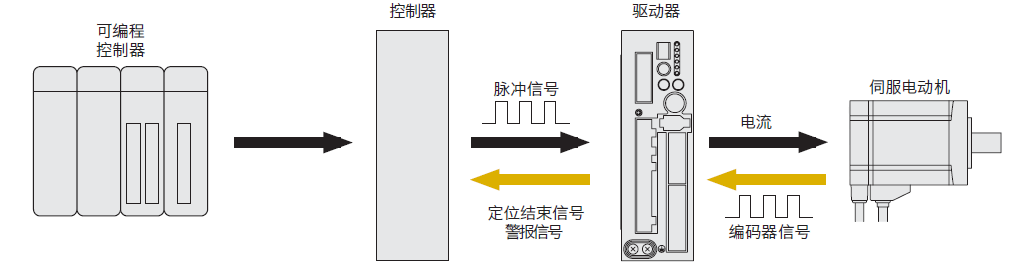
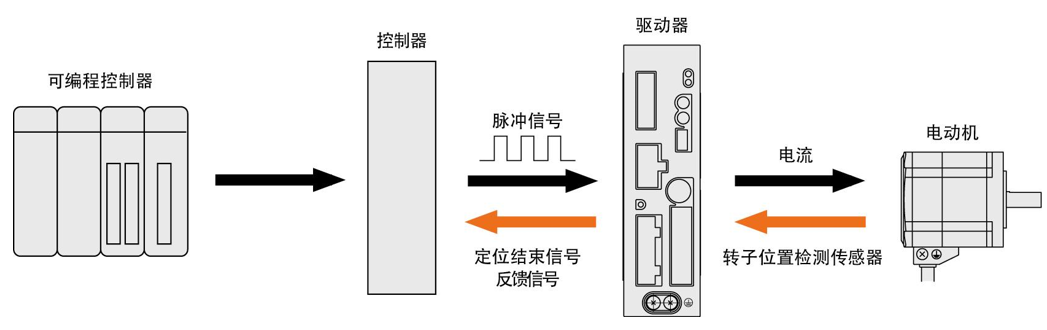
αSTEP AZ系列的系统构成示例
下图为脉冲型驱动器驱动αSTEP AZ系列时的系统构成示例。
通常情况下,驱动步进电动机需要驱动器、控制器以及上位可编程控制器。由于αSTEP在电动机的反输出轴侧内藏编码器,因此通过编码器信息反馈给驱动器,从转子旋转位置判断过负载领域。在过载领域时,切换到闭环控制,根据转子的旋转位置,将定子的旋转磁场控制在最佳位置。
此外,即使发生过载等异常情况,也可以启动保护功能并输出报警信号。

 咨询电话:13559220877
咨询电话:13559220877
 全国免费客服电话 13559220877
全国免费客服电话 13559220877 